Studium und Lehre
Labor für Handhabungstechnik und Robotik
Projekte und Studienarbeiten Sommersemester 2025
Im Labor für Handhabungstechnik und Robotik werden auch im Sommersemester 2025 wieder Projekte und Studienarbeiten für Studierendenteams aller Studiengänge angeboten. Der jeweilige Arbeitsaufwand - auch im Hinblick auf die zu erwerbenden Leistungspunkte - kann dabei abgestimmt werden.
Für alle Projektarbeiten gilt: Eine Bearbeitung im Team ist erwünscht. Die Teilnahme an den Lehrveranstaltungen 'Handhabungstechnik und Robotik' oder 'Montagetechnik und Automatisierung' ist nicht zwingend erforderlich - erleichtet bei einigen Projekten aber ggf. den Einstieg in die jeweilige Aufgabenstellung.
Bei Fragen zu den einzelnen Themen nehmen Sie bitte Kontakt via Email auf.
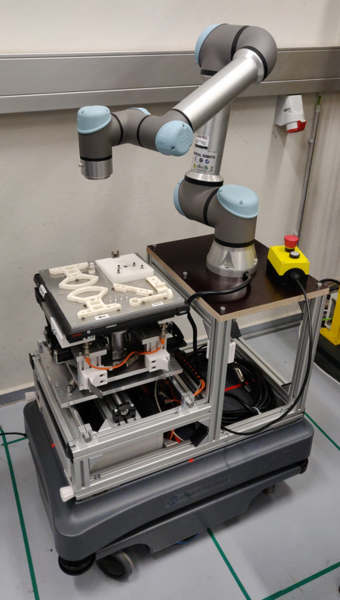
Im Labor für Handhabungstechnik und Robotik existiert ein mobiler Transport- und Montageroboter, der HS-MobiRob. Er besteht aus dem Transportroboter MiR200, auf den ein UR5e-Roboter und ein Transportbandelement aufgesetzt wurden. Das gesamte Robotersystem mit den Möglichkeiten eines Transports von Warenträgern im Labor und der Durchführung von Montagearbeiten auf den transportierten Warenträgern soll in weitere Labor-Produktionsszenarien und damit in die Smart Factory der Hochschule eingebunden werden. In vorhergehenden studentischen Projektarbeiten wurde bereits die Kommunikation zwischen dem HS-MobiRob und dem restlichen Montagesystem im Labor zu großen Stücken erledigt. Ebenso wurde das Andocken des Transportroboters an das Montagesystem realisiert (-> Video).
Ziel dieser Projektarbeit ist nun die Entwicklung und Inbetriebnahme weiterer Montageszenarien im Labor für Handhabungstechnik und Robotik. Dazu müssen ggf. weitere Aufbauten für den HS-MobiRob entworfen und zusammen mit der Betriebswerkstatt der Hochschule gebaut werden. Ebenso müssen Montagebewegungen für den UR5e-Roboter programmiert werden und neue Routen für den Transportroboter im Labor eingerichtet werden. Schließlich soll ein Gesamtszenario (Montagearbeiten im Montagesystem zusammen mit Materialbewegungen mittels Transportroboter) entworfen und realisiert werden.
Die Projektarbeit kann von 2 bis 6 Studierenden in Teamarbeit bearbeitet werden. Abhängig von der Personenzahl kann die Aufgabenstellung angepasst werden.

Im Labor für Handhabungstechnik und Robotik bildet ein Doppelgurtband-Transportsystem der Firma Bosch Rexroth die Basis des installierten automatischen Montagesystems. Mit dem Transportsystem werden die einzelnen Warenträger mit ihren Montageobjekten zu den jeweiligen Roboterstationen bewegt. Beim Wechsel der Warenträger an einer jeden Roboterstation muss der vorgehende Warenträger die Station zunächst verlassen, damit der bereits wartende Warenträger in die Station übergesetzt werden kann. Hierdurch geht bedingt durch die geringe Bandgeschwindigkeit (18 m/min) wertvolle Taktzeit verloren. Schnelleinzüge (auch Werkstückträger-Booster genannt) reduzieren dieses Problem, da sie die Warenträger unabhängig von der Bandgeschwindigkeit im Umfeld einer Roboterstation schneller bewegen.
In einer vorhergehenden Projektarbeit wurde bereits ein Schnelleinzug speziell für das Montagesystem im Labor konstruiert und prototypisch getestet. Mögliches Verbesserungspotenzial hinsichtlich Funktionalität, aber auch mit Blick auf Material- und Installationskosten wurde dabei sichtbar.
Das Ziel dieser Projekt- oder Studienarbeit ist eine grundlegende Analyse der bisherigen Arbeiten und die Ableitung von Optimierungspotenzialen. Dabei sollen generierte Ideen auch immer prototypisch in Zusammenarbeit mit der Betriebswerkstatt der Hochschule realisiert und praktisch in Versuchsläufen erprobt werden. Handwerkliches Geschick ist hierbei sicherlich von Vorteil.
Die Projekt- oder Studienarbeit kann von 2 - 5 Studierenden bearbeitet werden. Abhängig von der Teilnehmeranzahl kann die Aufgabenstellung angepasst werden.

Im Labor für Handhabungstechnik und Robotik existieren Industrieroboter namhafter Hersteller in unterschiedlichster Größe. Die Roboter werden entweder stand-alone oder im Verbund an einem Montagebandsystem eingesetzt (-> Bild). Unabhängig davon muss jeder Roboter für den spezifischen Einsatzzweck eingerichtet und programmiert werden. Allen Bemühungen zum Trotz gibt es bis heute keinen Standard für eine Roboterprogrammiersprache. Stattdessen hat jeder Hersteller für seine Roboter über Jahre eine eigene Programmsprache entwickelt. Im Zeitalter KI-gestützter Programmentwicklung (z.B. mit ChatGPT) muss dies aber bei der Inbetriebnahme eines Roboters kein Problem mehr darstellen.
In dieser Projektarbeit soll nun untersucht werden, inwieweit ChatGPT als Hilfsmittel bei der Erstellung von Roboterprogrammen für die im Labor vorhandenen Roboter genutzt werden kann. Dazu muss zunächst die Bedienung und (eben doch) Progammierung der betreffenden Roboter kennengelernt werden. Anschließend müssen typische Anwendungsszenarien für die Roboter erdacht werden, um schließlich die Programmgenerierung mittels ChatGTP durchzuführen. Am Ende muss geprüft und untersucht werden, ob die Programmerstellung mittels ChatGPT eine sinnvolle Möglichkeit bei der Roboterprogrammierung darstellt.
Die Projektarbeit kann von 2 bis 6 Studierenden in Teamarbeit bearbeitet werden. Abhängig von der Personenzahl kann die Aufgabenstellung entsprechend angepasst werden.